Themen für Abschlussarbeiten und Projekte
Hier finden Sie einige Themen, die für Abschlussarbeiten, semesterbegleitende Projekte o. ä. in Frage kommen. Neben den hier vorgestellten gibt es meist noch weitere Themenstellungen -- sprechen Sie mich also gerne dazu an.
Ich betreue natürlich auch "Ihre" Themen -- vorrangig aus den Bereichen Robotik, Automatisierungstechnik, Produktionstechnik und -planung.
Waldbrandbekämpfung mit KI
Die Waldbrände der letzten Jahre zeigen eine hohe Schadensbilanz mit hohen Kosten für Gemeinden und Privatpersonen.
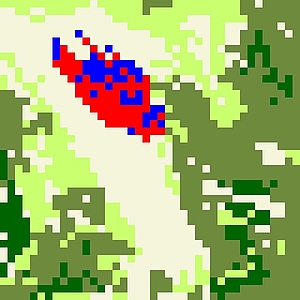
Über eine Brandsimulation sollen verschiedene Löschstrategien bewertet werden, um so den Einsatzkräften abhängig von der Brandlast und den Wetterbedingungen (Windgeschwindigkeit und -richtung, Temperatur, etc.) eine optimiemale Löschstrategie vorzuschlagen.
Es wurde bereits ein Reinforcement-Learning-Algorithmus auf Basis der Brandsimulation Cell2Fireentwickelt, der die grundlegende Funktionalität abbildet. Zum jetzigen Zeitpunkt benötigt die KI jedoch noch einen hohen zeitlichen Aufwand um eine generalisierte Strategie zur Bekämpfung verschiedener Brände zu erlernen.
Der Algorithmus soll deshalb durch Reinforcement Intention Learning erweitert/ ersetzt werden, um die Lern- und Optimierungszeiten deutlich zu reduzieren.
Aufgabenstellung:
Erweiterung der bestehenden Architektur (Reinforcement Learning) durch Reinforcement Intention Learning
Evaluation des Lernverhaltens
Vergleich verschiedener Waldbrandszenarien gegenüber der bestehenden Methode
p { line-height: 115%; text-align: left; orphans: 2; widows: 2; margin-bottom: 0.1in; direction: ltr; background: transparent }a:visited { color: #800000; text-decoration: underline }a:link { color: #0563c1; text-decoration: underline }
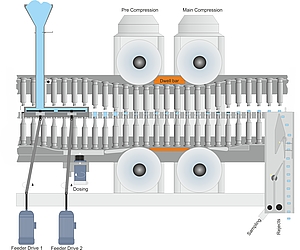
Korsch AG: Autotuning einer Tablettenpresse auf Basis eines evolutionären Algorithmus
Im Projekt soll ein innovatives System für die automatische Optimierung (Autotuning) von Tablettenpressen entwickelt werden. Diese Maschinen sind zentrale Elemente in der pharmazeutischen Produktion und benötigen höchste Präzision, um die Qualität der Tabletten sicherzustellen.
Der Einfluss verschiedener Einflussparameter auf den Pressprozess ist derzeit nur durch zeitaufwändige empirische Tests bestimmbar. Diese Trial-and-Error-Methode führt zu ineffizienten Prozessen und einem hohen Schulungsaufwand für Bediener.
Zielsetzung
In dem Projekt soll ein System entwickelt werden, das mithilfe eines evolutionären Algorithmus automatisch die optimalen Maschineneinstellungen ermittelt. Durch die Implementierung eines solchen Autotuning-Systems wird erwartet:
- die Effizienz der Maschine zu steigern,
- den Schulungsaufwand für Bediener zu verringern,
- die Serviceanfragen für triviale Problemstellungen zu reduzieren.
Projektphasen
- Evaluation des Einsatzgebietes: Identifikation relevanter Parameter und Anforderungen für das Autotuning.
- Entwicklung eines Prototyps: Implementierung des Algorithmus und Integration in das Maschinensteuerungssystem (Siemens SPS).
- Usability-Tests: Erprobung des Prototyps mit realen Benutzern im Innovationszentrum.

Entwicklung Datenlogger für "Lärmscanner" (ML-basierte Audioanalyse)
Lärm hat auf verschiedenen Ebenen einen negativen Einfluss auf die Gesundheit und Lebensqualität
Um geeignete Verbesserungsmaßnahmen ergreifen zu können, ist es sinnvoll, die konkreten Lärmquellen zu identifizieren und gegenüberzustellen – auch für vorher/nachher-Vergleiche.
- Welche Lärmquellen gibt es (Straßenverkehr, Musik, Barpublikum, Gewerbe/ Maschinen, Baustellen, ...),
- in welchen Zeiträumen (Nachtzeit) sind die Belastungen besonders kritisch)?
Es wurde bereits eine Software entwickelt, welche Umgebungsgeräusche aufzeichnet und über Machine Learning (ML) Methoden automatisch analysiert/kategorisiert. An einer Messstelle (z. B. Straße) kann so festgestellt werden, welche Geräuschquellen (Verkehr, Personen, Musik, ...) in welcher Lautstärke und in welcher Häufigkeit und Tageszeit auftreten. Die erfassten Daten werden grafisch aufbereitet. Identifizierte Einzelgeräuschquellen werden gelistet dargestellt. Die Kategorisierung kann überprüft und ggf. manuell korrigiert werden.
Als nächster Schritt soll eine für den Anwendungsfall optimierte Hardware für das Datenlogging entwickelt werden.
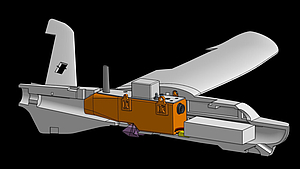
Der Verein SearchWing e. V. entwickelt und produziert Drohnen zur Unterstützung der Seenotrettung.
Bei SearchWing sind Arbeiten zu verschiedenen Themenstellungen möglich, die hochschulseitig von mir betreut werden können (siehe auch https://gitlab.com/searchwing/development/searchwing-documents/-/issues/1):
Themen mit dem Fokus Software:
- Automatisiertes Planen einer Landetrajektorie für das Semi-Automatisierte Landen im Wasser neben dem Rettungsschiff
- Automatisiertes Netz-Landen des Flugzeuges auf dem Rettungsschiff Software: Entwicklung im Simulator mittels Trajektorien-Grobplanung, Markererkennung, und Flugzeugregelung (https://gitlab.com/searchwing/development/payloads/marker_landing/-/issues/1)
- Entwicklung eines browserbasierten Echtzeit-Reviewtools mittels Karten- und Bildansicht für die Bewertung von Seenotrettungsfällen (https://gitlab.com/searchwing/development/groundstation/searchwing-gui/-/issues/92)
- Entwicklung einer automatisierten Steuerung für gimbalstabilisierte Kameras für die systematische Suche von Seenotrettungsfällen
- Erstellung einer Open-Source basierten Testumgebung um Autopilot- & Payload-Firmware im SITL zu testen
- Erstellung einer portablen Entwicklungsumgebung für Softwareentwickler mittels eines Devcontainers
Themen mit dem Fokus Hardware:
- Automatisiertes Netz-Landen des Flugzeuges auf dem Rettungsschiff Hardware: Entwicklung eines Nah-Infrarot Lande-Beacons und dessen Erkennung mittels Kamera
- Inbetriebnahme von Low-Light-Kameras auf der Raspberry-Pi basierten Drohnen-Payload für das finden von Seenotrettungsfällen bei Nacht (https://gitlab.com/searchwing/development/payloads/ros-vision-generic/-/issues/24, https://wiki.searchwing.org/en/home/Development/Payload-Camera/low_light_cameras)
- Inbetriebnahme einer Wärmebildkamera und wasserdichte mechanische Integration mittels eines Germanium-Fensters in die Drohnen-Payload für das Finden von Seenotrettungsfällen bei Nacht
- Design eines wasserdichten Kamera Gehäuses für Gimbal stabilisierte Kameras
- Erstellung einer 3D-druckbaren, parametrisierbaren, wiederverschließbaren, wasserdichten Box mittels CAD Software mit O-Ring (https://gitlab.com/searchwing/development/TheBox/-/issues/9)



Continuum Innovation entwickelt kollaborative Roboter auf Basis einer seilgesteuerten Kinematik. Die Firma wurde von HTW-Absolventen gegründet.
Bei Continuum Innovation können verschiedene Themenstellungen (Details siehe hier) bearbeitet werden.
- PCB-Design und Software-Bibliothek zum Auslesen von Wägezellen entwickeln
- Auslegung, PCB-Entwurf, Aufbau und Test eines Netzteils inkl. CAN-Schnittstelle
- Überarbeitung / Verbesserung der vorhandenen (selbst entwickelten) Motorsteuerplatine
- Entwicklung und Aufbau eines Versuchsstandes zur Evaluierung von Seil-/ Gleitlager-Materialkombinationen
- Objekterkennung innerhalb einer Pick-And-Place-Anwendung (otional inkl. Steuerung über LLM-Sprachmodell)
- End-Of-Arm-Tool mit Mini-Projektor (Konzeptionierung, Aufbau Prototyp, Test von UX/UI-Ideen)
