Projekte
KI-basierte akustische Qualitätskontrolle während der Montage
Dieses Projekt setzt auf einem an der HTW Berlin entwickelten Baukastensystem zur KI-basierten Audioanalyse auf. Das Baukstensystem erlaubt ein nutzerfreundlichen Trainieren verschiedender KI-Modelle und die Anwendung dieser Modelle auf Audiodaten.
Im laufenden Projekt wird das allgemeine Framework auf die Qualitätskontrolle bei der montage angewendet (insbesondere Steckverbinder sowie die Hutschienenmontage). Ziel ist eine anwendungsspezifische Optimierung der Modelle un der Aufba eines entsprechenden Demonstrator-Setups.
Entwicklung und Simulation eines Gimbalkamerasystems zur Effizienzsteigerung maritimer Suchmissionen
Projekt des "Master-By-Research"-Tracks des Studiengangs "Informatik in den Ingenieurwissenschaften" (IIW)
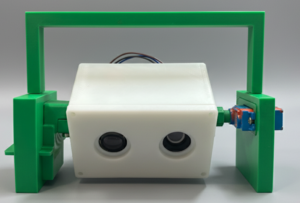
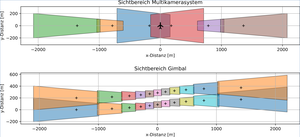
Die gemeinnützige Organisation SearchWing e. V. entwickelt und baut Starrflügler-Drohnen, um Boote in Seenot zu lokalisieren. Das bisherige System arbeitet mit starren Kameras, wodurch nur ein begrenzter Sichtbereich erfasst werden kann. Um Suchmissionen effizienter zu gestalten, wurde ein aktiv gesteuertes Gimbalkamerasystem entwickelt.
Zentrale Komponente des Gimbalkamerasystems ist die verwendete Kamera. Besonders relevant für die Effizienz der Suchmission sind die Auflösung der aufgenommenen Bilder sowie die Größe des abgedeckten Bereichs. Zur Ermittlung der optimal geeigneten Kamera wurde ein Simulationsprogramm entwickelt, das die Sichtbereiche unterschiedlicher Kameras auf Basis technischer Parameter berechnet und visualisiert. So können Kameras direkt miteinander verglichen werden. Zusätzlich können operative Parameter wie luggeschwindigkeit und Stellgeschwindigkeit des Motors definiert werden, um so eine bewegliche Kamera zu simulieren.
Im Verlauf der Entwicklung verlagerte sich der Fokus zunehmend auf das Simulationsprogramm. Im weiteren Verlauf soll dieses umfangreich erweitert und anderen Organisationen zur Verfügung gestellt werden.
Kraftbasierte Kalibrierung und Suchstrategien
Projekte des "Master-By-Research"-Tracks des Studiengangs "Informatik in den Ingenieurwissenschaften" (IIW)
Im SoSe 2025 laufen wieder zwei Projekte des IIW-Master-By-Research im Robotiklabor.Beide nutzen die Impedanzregelung des KUKA LBR iiwa, um Toleranzen im Produktionsumfeld auszugleichen:
- Entwicklung und Umsetzung von kraftbasierten Suchstrategien für Schraubenköpfe: Dies erlaubt größere Toleranzen bei der Positionierung von Bauteilen oder bei der Erkennung der Schraubenposition durch kamerabasierte Systeme. Produktionsabläufe müssen dadurch weniger starr und Kamerasysteme weniger genau (=teuer) sein.
- Entwicklung und Umsetzung einer kraftbasierten Kalibrierung an mobilen Plattformen / wechselnden Arbeitsstationen: Roboter auf mobilen Plattformen können Tätigkeiten an wechselnden Arbeitsstationen ausführen. Die Positioniergenauigkeit der Plattformen relativ zu den Stationen reicht dabei jedoch (bspw.) für Montageaufgaben nicht aus. In dem Projekt wird eine Kalibrierung entwickelt, die eine Positioniergenauigkeit wie bei einem fest installierten Gerät ermöglicht.

Lärmscanner (ML-basierte Audioanalyse)
Lärm hat auf verschiedenen Ebenen einen negativen Einfluss auf die Gesundheit und Lebensqualität
Um geeignete Verbesserungsmaßnahmen ergreifen zu können, ist es sinnvoll, die konkreten Lärmquellen zu identifizieren und gegenüberzustellen – auch für vorher/nachher-Vergleiche.
- Welche Lärmquellen gibt es (Straßenverkehr, Musik, Barpublikum, Gewerbe/ Maschinen, Baustellen, ...),
- in welchen Zeiträumen (Nachtzeit) sind die Belastungen besonders kritisch)?
Im Rahmen des Projektes wurde eine Software entwickelt, welche Umgebungsgeräusche aufzeichnet und über ML-Methoden automatisch analysiert/kategorisiert. An einer Messstelle (z. B. Straße) kann so festgestellt werden, welche Geräuschquellen (Verkehr, Personen, Musik, ...) in welcher Lautstärke und in welcher Häufigkeit und Tageszeit auftreten. Die erfassten Daten werden grafisch aufbereitet. Identifizierte Einzelgeräuschquellen werden gelistet dargestellt. Die Kategorisierung kann überprüft und ggf. manuell korrigiert werden.
Im nächsten Schritt ist die Entwicklung einer spziellen Datenlogger-Hardware geplant.
Automatische Schraubenerkennung und -montage mittels Machine Learning
Problemstellung
In der industriellen Montage ist die präzise Erkennung und Lokalisierung von Schraubentypen (bspw. Innen- und Außensechskant) eine Herausforderung. Dieses Projekt entwickelt ein System zur robusten Erkennung von Schraubenköpfen mit YOLOv8 von Ultralytics und einem Raspberry Pi sowie der automatischen Pfadgenerierung für den Roboter KUKA LBR iiwa 7R800 (welcher die erkannten Schrauben anziehen soll).
Aktueller Bearbeitungsstand
Das System erkennt Schrauben auf einem Webstream und bestimmt ihre Position. Als Positionsreferenzen dienen QR-Codes auf der Arbeitsstation. Die Erkennung zeigt aktuell bereits gute Ergebnisse; das Macheine Learning Modell muss jedoch noch robuster gegenüber sich ändernden Lichtbedingungen werden. Die Generierung von kollisionsfreien Anfahrtswegen für den Roboter anhand der bestimmten Koordinaten ist aktuell in Arbeit (Stand Okt. 2024).
Das Projekt wird im Rahmen des Tracks "Angewandte Forschung" des Master-Studiengangs "Informatik in den Ingenieurwissenschaften" (https://iiw.htw-berlin.de/) bearbeitet.


"Pilothafte Entwicklung und feuerwehrtechnische Erprobung eines Löschdrohnenschwarms zur direkten Vegetationsbrandbekämpfung" - PEELIKAN
Waldbrände sind Naturkatastrophen mit verheerenden Konsequenzen für die Umwelt und den Menschen. Die Zahl der Wald- und Vegetationsbrände ist durch den fortschreitenden Klimawandel in den letzten Jahrzehnten weltweit stark angestiegen. Ein Grund für uns gemeinsam mit Experten der Feuerwehr ein Löschdrohnen-System zu entwickeln, dass die Brandbekämpfung revolutionieren und eine effiziente Ergänzung zu herkömmlichen Löschmethoden darstellen wird.
Für die HTW Berlin steht im Forschungsprojekt PEELIKAN die Weiterentwicklung der Drohnen, die kooperative Steuerung des Drohnenschwarms und die Integration automatisierter Schnittstellen zwischen Drohnen und Bodenstation im Fokus.
Diese als auch die Schnittstellen zwischen der Bedienstation und Einsatzleitung stellen besondere Herausforderungen dar, die innerhalb des Projekts durch die HTW Berlin (FB2) bearbeitet werden. Daneben gilt es sicherheitsrelevante Abläufe für Notlandungen und den Rückzug beim Einsatz von anderen Systemen im Luftraum zu etablieren, um einen sicheren Betrieb des Drohnenschwarms zu gewährleisten.

CommonBot
Lernfähige Robotersysteme für die lokale Produktion (01.04.-30.09.2023)
Robotersysteme können zur Stärkung lokaler Produktionsketten beitragen. Dazu müssen diese aber günstiger und einfacher adaptierbar werden und besser auf sich verändernde Umgebungsbedingungen reagieren.
Innerhalb des vom IFAF Berlin geförderten Projektes wurde untersucht, inwiefern einfache massenproduzierte Sensoren in Verbindung mit KI-Systemen dazu beitragen können und ob die Bereitstellung von Algorithmen und Konstruktionsunterlagen als Open-Source-Material deren Verbreitung begünstigen.